

不管是现阶段的智能辅助驾驶,还是未来真正意义的自动驾驶,都一直是个相当有意思的话题。
很多人既对这个终极梦想充满期待,但却又不得不因这发展进程中的种种不完美而心生疑虑,望而却步。
各家新势力都不约而同地选择了针对不同的场景来分阶段突破的策略,和“蔚小理”不同的是,威马选择了使用使用频次更高、但安全风险更低的泊车场景来作为突破口。
毕竟,曾考过驾照的人都会知道,“科目二”是考试中最让人畏惧的一项。

在即将于10月份正式OTA的针对威马W6的新版本之中,最核心的部分别是对AVP无人自主泊车系统的优化升级和语音交互的优化,我也第一时间对这个还是处于内测中的新版本进行了体验。
相比起其他品牌的较为常规的自动泊车功能,威马这套“智能停车全家桶”中包括了“360°全景倒车影像”、“APA自动泊车辅助”、“RPA遥控泊车辅助”、“HAVP自主学习泊车”、“PAVP高精地图泊车”(暂时未开通)这5大功能。

其中前两项辅助功能,在大多数智能电动车中,已经算是标准配置了,并不算新鲜;遥控泊车功能,其实在其他一些品牌上也已经有搭载,主要是针对遇到一些特别狭窄的停车位而设计的,驾驶者只需把车开到停车位前,就可以下车通过手机app遥控车辆停入车位里面。
但威马W6则更进了一步,在之前新车推出的时候,已经具备了HAVP自主学习泊车功能,是针对在单位或者住宅停车场拥有固定停车位的用户而开发的一个功能。
简单来说,是用户只需驾驶威马W6完成一次泊车操作,系统便会自动记录下起始位置和行经的路线,之后就能实现在这个场景下的自动入库和出库的功能。

这次即将OTA的新版本,针对这功能新增了“绕桩避障”和“侧方泊车”两个最重要的能力。
在体验环节里,我看到测试的威马W6在距离地上随机放置的雪糕筒大概一米多开外,就已经探测到障碍物并且开始打方向绕行避让。避让后车辆就会重新回到原记忆路线上,完成后续的自动泊车动作。
从这次W6的避让动作和整个过程的流畅度可以看出,各传感器的感知能力还是比较不错的,不过可能目前仍是测试版的原因吧,设定仍较为保守,无论是正面还是侧面,都和障碍物之间预留出非常充裕的距离。

好处就不用多讲了,就是能尽量确保安全,不容易剐蹭,但不足之处就是在一些相对狭窄的停车场里,可能实际上能绕行通过的地方,会因为要预留过多的安全距离,导致最终无法顺利通过,降低成功率。

另外一点,就是威马官方为了确保泊车过程的安全性,所以在功能设计上,是需要车主在泊车过程中一直按住app上的虚拟按键的。
所以这就会导致在一些手机信号不好,或者容易受到干扰的地方,难免会出现“走走停停”的情况,影响整个泊车体验。
此前威马汽车CEO沈晖甚至还在社交平台上提出过“科目二是不是也可以取消了”的话题,引发了不少网友的热烈讨论。
在我看来,“取消科目二”这或许更像是威马汽车对未来自动泊车技术完全取代人手泊车的一个美好愿景吧,在全行业还未能完全普及无人自动泊车之前,科目二始终还是必须面对的考题了。
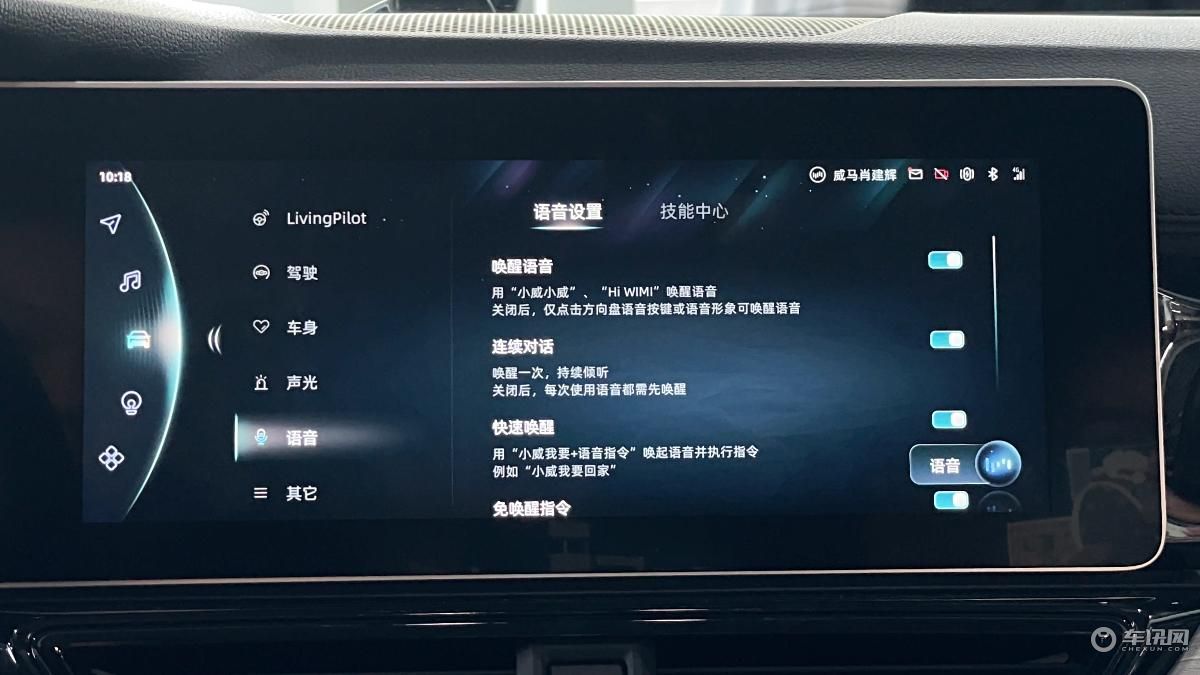
另一个比较有意思的升级,是被官方称作“一句三连”的功能,也就是可以让车机能执行驾驶者一句话里包含的三个连续指令,这实际上也是人机语音交互能力的一次提升。
从我现场实测的表现来看,语音识别的速度和准确率都不错,而且从发出指令到实际执行之间的间隔也很短,实用性还是相当高的。
我从威马工程师那里确认过,语音识别的能力是直接内置于车机端的,无需依靠移动网络进行云处理。
所以这不但不会受移动信号的影响,而且还保证了更快的反应速度。

这次威马W6的即将OTA内容还有不少,还包括了UI的美化和支持更多的自定义场景模式等,更详细的体验就留待正式推送后再进行深度体验了。
从最近蔚来、理想和威马的这几次OTA升级内容上不难看出,除了智能辅助驾驶系统的优化升级之外,车企是越来越重视如UI设计、语音智能座舱这些更能影响日常用车体验的方面了。
我相信,这也是这个智能化趋势下,最吸引人的地方吧。
 状态
状态
 点击完成分享
点击完成分享
{{item.mainInfo.fromUserName?item.mainInfo.fromUserName:item.fromUserName}}
{{item.mainInfo.createTime?item.mainInfo.createTime:item.createTime}}
{{item.mainInfo.content?item.mainInfo.content:item.content}}